
RINQ GNSS補正情報配信サービス
商品について

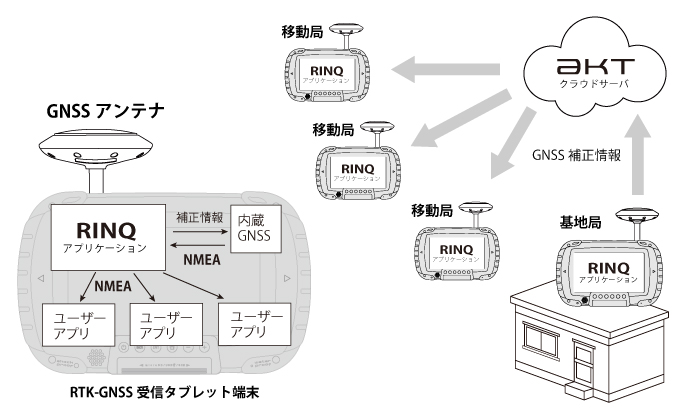
RINQ / RTCM Internet Neo Query(リンク)は、HDT280向けのクラウド型GNSS補正情報配信サービスです。HDT280をGNSS補正情報の配信ステーションとして利用でき、移動局側のHDT280は補正情報を使って高精度な1周波RTK測位が可能になります。
特 徴
RINQの主な特徴
- プライベ-トクラウド型相対測位方式でセンチメ-トル精度を実現
- 基地局、移動局を簡単に設置。基地局、移動局共にHDT280とGNSSアンテナだけのシンプルな構成
- HDT280内蔵の3G/LTE通信を使用するため、別途無線機などは不要。無線の干渉などを気にする必要がありません
- 基地局HDT280 1台に対し、最大999台の移動局HDT280で測位可能
- 移動局HDT280では、最大2GNSS(GPS+GLONASS or GPS+BeiDou)が使用可能
- 補正情報の送受信には、アカサカテッククラウドサービスを使用
- 1周波RTK-GNSSの測位デ-タはNMEA0183として出力し、HDT280内で動作するAndroidアプリで利用可能
- 最大5HzでNMEAセンテンス(GGA, GNS, GSA, GSV, RMC, VTG, ZDA)の出力が可能
※測位精度は基線長により変動します。
※本サ-ビスは3G/LTE通信エリア内で利用できます。
システム構成
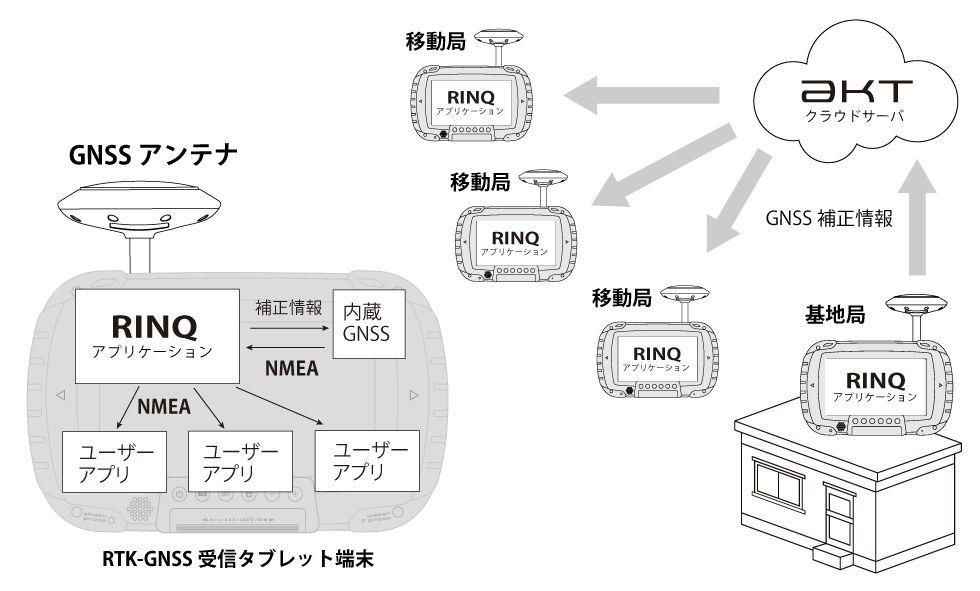
基地局から複数に補正波を配信
補正情報配信の利用で、より正確な位置情報で車両や可動設備を運用できるようになります。
1台の基地局を設置するだけで、多くの受信ユニットに配信が可能です。複数の基地局が不要となることで、従来よりも設備投資の削減を図ることができます。
導入事例
ケース1:工事現場
SmartRoller クラウド型転圧管理システムを使用(参考)
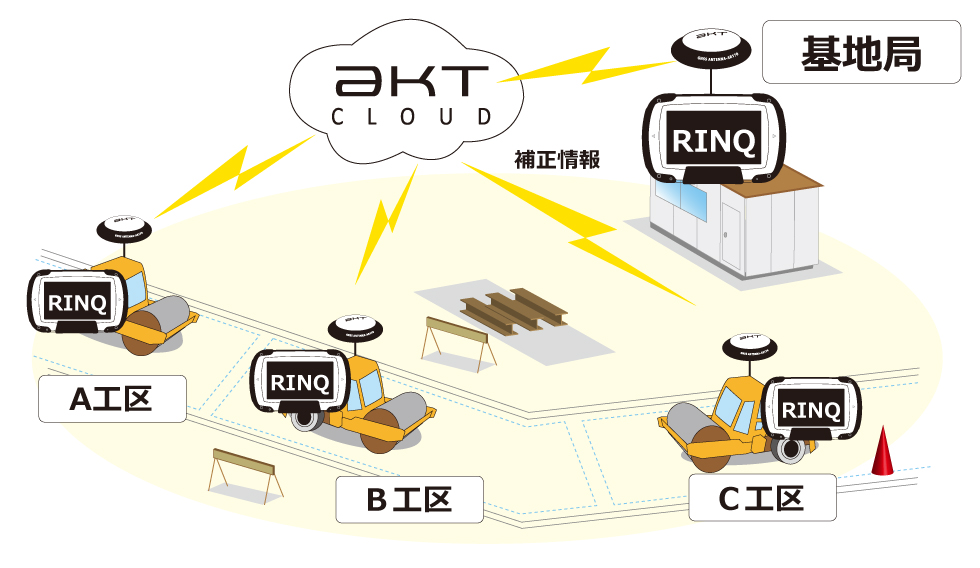
設置した1台の基地局から複数の現場に(約10km以内)、あるいは同じ現場の複数の移動局(HDT280)に、補正波(補正情報)の WEB 配信が可能です。
ケース2:列車運行
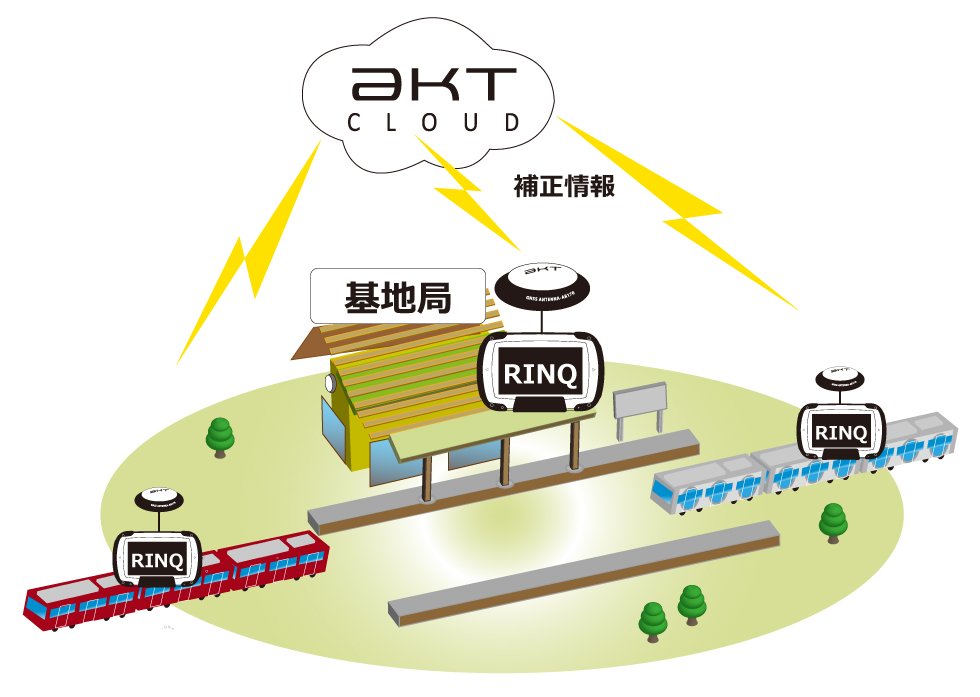
運行列車の現在位置を正確に把握します。
オンタイム管理による、すばやい安全確認を実現します。
ケース3:空港
RTF300 1周波 RTK-GNSS受信機を使用(参考)
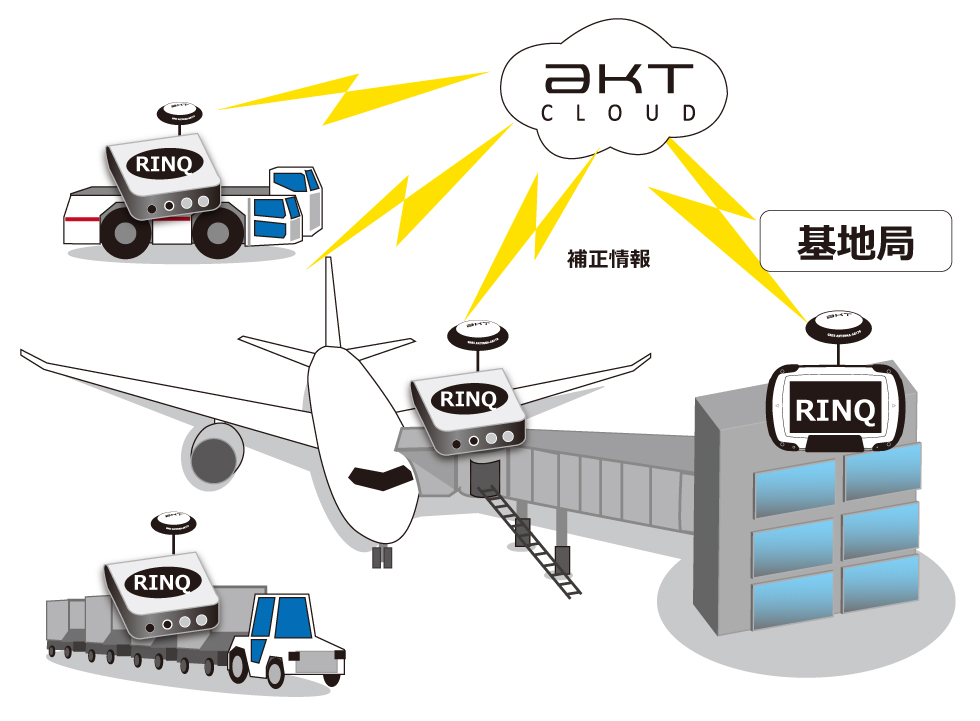
ボーディングブリッジの自動接続などで、複数の基地局が不要になり、設備投資を削減できます。作業車両のオンタイム位置管理で、安全性と作業効率のアップにつながります。
従来のネットワ-ク型測位との違い
- RINQを使用することで、基準点のアンテナと移動局のアンテナの装置間バイアスが相殺されます。
- プライベ-トクラウド型のため、基地局側の設定を切り替えることで、BeiDouの補正情報が利用可能。
- BeiDou衛星を使用することで、東アジア、東南アジア、インドでの利用可能衛星数が今後大幅に増加。※2018年内に12機の打ち上げ。2020年までに32機の打ち上げ予定が2017/3/6に正式発表
- HTTPプロトコルのREST APIを採用したため、移動局の増加に対してクラウドサーバのスケ-ルアウトがシンプルで容易。
1周波RTK-GNSS評価デ-タ
従来1周波測位でデメリットとなっていた初期化時間、サイクルスリップからの復帰時間を大幅に改善。マルチGNSSの対応により使用出来る衛星数が飛躍的に多くなり、以前の2周波GPS受信機と遜色ないレベルになっています。
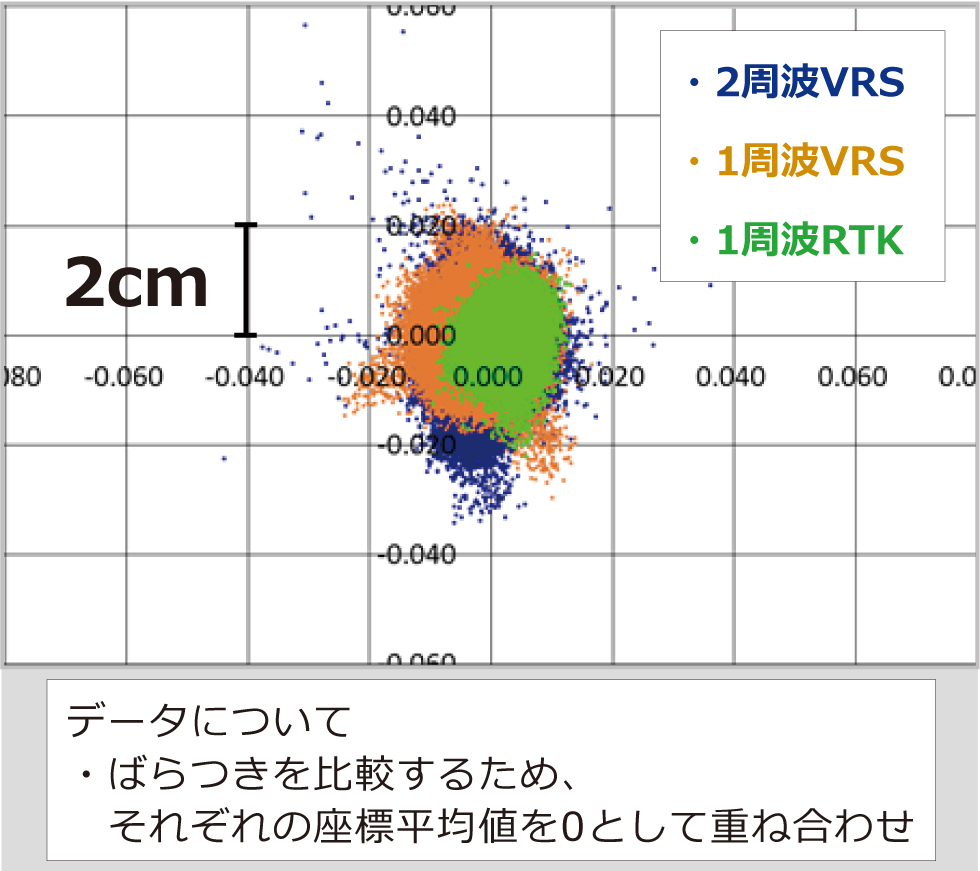
定点観測データ 散布図(1Hz:24時間)
| 標準偏差 | X | Y | Z | |
| ① | 2周波VRS (GPS+GLONASS) | 0.006m | 0.004m | 0.012m |
| ② | 1周波VRS (GPS+GLONASS) | 0.005m | 0.004m | 0.013m |
| ③ | 1周波RTK (GPS+BeiDou) | 0.003m | 0.003m | 0.008m |
|---|
初期化時間 計測結果
| 使用機器 | 使用衛星 | 最短時間 | 平均時間 | 衛星数 | |||
| ① | 2周波VRS | Base | VRS | GPS, GLONASS | 1.0秒 | 1.0秒 | 14~15 |
| Rover | 2周波受信機 | ||||||
| ② | 1周波VRS | Base | VRS | GPS, GLONASS | 6.0秒 | 106.1秒 | 11~12 |
| Rover | HDT280 | ||||||
| ③ | 1周波RTK | Base | HDT280 | GPS, BeiDou | 6.0秒 | 6.8秒 | 13~15 |
|---|---|---|---|---|---|---|---|
| Rover | HDT280 | ||||||
サイクルスリップ復帰時間 計測結果
| 使用機器 | 使用衛星 | 最短時間 | 平均時間 | 衛星数 | |||
| ① | 2周波VRS | Base | VRS | GPS, GLONASS | 3.0秒 | 6.1秒 | 12~15 |
| Rover | 2周波受信機 | ||||||
| ② | 1周波VRS | Base | VRS | GPS, GLONASS | 6.0秒 | 10.2秒 | 12 |
| Rover | HDT280 | ||||||
| ③ | 1周波RTK | Base | HDT280 | GPS, BeiDou | 6.0秒 | 8.5秒 | 17 |
|---|---|---|---|---|---|---|---|
| Rover | HDT280 | ||||||
※ 表記数値は、当社の実験によるもので性能を保証するものではありません。
※ 初期化時間およびサイクルスリップ復帰時間は、10回の平均。
その他製品に関するご案内






